博文
平行掘进: 基于ACP理论的掘-支-锚智能控制理论与关键技术
||
引用格式:杨健健, 葛世荣, 王飞跃, 罗文杰, 张雨晨, 胡兴涛, 朱涛, 吴淼, “平行掘进:基于ACP理论的掘-支-锚智能控制理论与关键技术”, 煤炭学报, 2021, Vol. 46, No. 7, pp. 2100-2111.
Citation: YANG Jianjian, GE Shirong, WANG Feiyue, LUO Wenjie, ZHANG Yuchen, HU Xingtao, ZHU Tao, WU Miao , "Parallel tunneling:Intelligent control and key technologies for tunneling, supporting and anchoring based on ACP theory", Journal of China Coal Society, 2021, Vol. 46, No. 7, pp. 2100-2111.
平行掘进:基于ACP理论的掘-支-锚智能控制理论与关键技术
杨健健, 葛世荣, 王飞跃, 罗文杰, 张雨晨, 胡兴涛, 朱涛, 吴 淼
摘 要:虽然智能掘进技术已取得了一些进步,提出了护盾式、掘锚式等掘-支-锚多装备的样机设计,但从设备适用性及装备配套性角度,仍存在个体装备设计不严谨、样机改型成本高、装备控制不精准、巷道场景多样不适应、群体设备难一致协同等诸多问题。造成上述问题的首要原因是缺少煤矿特殊生产环境下群体设备联动协同控制的基础理论研究,主要表现为对智能掘进所需的设备模型、场景实验、数据驱动等基础理论缺少研究。针对掘进复杂系统难以建模与实验不足等问题,提出了平行掘进系统的研究思想,试图用一种适合复杂系统的计算理论与方法解决智能化掘进现存问题,主要利用大型计算模型、预测并诱发引导复杂系统现象,通过整合人工社会、计算实验和平行系统等方法,形成新的计算研究体系。以智能掘进复杂系统为研究对象,重点考虑掘-支-锚系统的整体控制理论与方法,结合智能化掘进相关研究基础和方法,融入当前国内外复杂系统研究的最新科研进展,基于平行控制基础理论及ACP(Artificial,Computing,Parallel)方法框架,运用代理控制理念及自适应动态规划多智能体研究方法,开展智能掘进复杂系统的掘-支-锚平行控制基础理论与方法研究。针对巷道复杂环境下的群体设备离散控制现状,运用整体系统论的方法,完成掘进系统的掘进、支护、钻锚群体设备代理模型的构建,根据多场景下复杂系统的计算实验克服掘进巷道环境复杂、恶劣的工程验证难题,最终实现智能掘进平行控制方法的理论创新与方法验证。
关键词: 平行掘进; 掘-支-锚; ACP理论; 智能掘进; 平行控制; 代理模型
Parallel tunneling: Intelligent control and key technologies for tunneling, supporting and anchoring based on ACP theory
YANG Jianjian, GE Shirong, WANG Feiyue, LUO Wenjie, ZHANG Yuchen, HU Xingtao, ZHU Tao, WU Miao
Abstract: Although intelligent drivage technology has made some progress,and the prototype design of shield type and anchor-excavation type excavation-bolt-anchor multi-equipment are presented,from the equipment applicability and equipment matching point of view,there are still many problems,such as un-rigorous individual equipment design,high cost of prototype modification,inaccurate equipment control,diverse heading scenes,un-adaptability to group equipment and difficult coordination.The primary reason for the above problems is the lack of basic theoretical research on group equipment linkage and collaborative control under the special production environment of coal mine,which is mainly manifested in the lack of basic theoretical research on equipment model,scene experiment and data drive required by intelligent drivage.The modeling of drivage complex system is difficult and the experiment is insufficient.Therefore,the research idea of parallel drivage system is put forward for the first time,trying to solve the existing problems of intelligent drivage with a kind of calculation theory and method suitable for complex system.Some large-scale computational models are used to predict and induce complex system phenomena by integrating artificial social computing experiments and parallel systems to form a new computing research system.Taking the intelligent drivage complex system as the research object,this paper focuses on the overall control theory and method of the excavation support anchor system,combines with the relevant research basis and method of intelligent drivage,integrates the latest research progress of complex system,is based on the basic theory of parallel control and ACP (artificial,computing,parallel) method framework,and applies multi-agent research method based on agent control and adaptive dynamic programming.Also,it presents the research on the parallel control theory and method of excavation-bolt-anchor for intelligent drivage complex system,current situation of discrete control of group equipment in complex environment of roadway.Based on the holistic system theory,the agent model of the drivage support group equipment of the drivage system is constructed.According to the calculation experiment of the complex system under multiple scenes,the engineering verification problem of the complex and bad environment of roadway was overcome.Finally,the theory innovation and method verification of intelligent drivage parallel control method are realized.
Key words: parallel tunneling; tunneling supporting and anchoring; ACP theory; intelligent driving; parallel control; agent model
《国民经济和社会发展第十四个五年规划和2035年远景目标纲要》(以下简称《纲要》)已正式公布。《纲要》规划部署的碳达峰、碳中和路线图对未来的发展具有重要的意义。在碳达峰、碳中和的目标要求下,发挥煤矿企业实施主体作用,加快煤矿智能化建设,深化煤炭清洁安全高效生产和利用,加速煤炭行业的绿色发展。
我国约有90%的煤炭资源以井工方式开采,井下开采的首先工序是掘挖出地下运输和通风巷道,必须做到“采掘并重,掘进先行”。当前,巷道掘进的智能化进展落后于采煤,出现严重的采掘进度失衡、井下作业人员依然很多的局面,其中的关键技术瓶颈之一是无法实现掘进-支护-锚固的平行快速协同作业。目前,我国煤矿每年巷道掘进量超过12 000 km,综掘工作面掘进班组作业人员20万~30万人[1-4]。因此,智能化快速掘进对于煤矿安全生产的减人增安提效具有重要意义,也是我国煤矿智能化发展的主要方向,被列入了国家2019年发布的《煤矿机器人重点研发目录》和2020年发布的《关于加快煤矿智能化发展的指导意见》之中。
因全断面掘进机(煤矿盾构机)使用滚刀切割实现破岩,一次性完成巷道断面成形,但其结构复杂,造价昂贵,对恶劣工况适应性差,在全国东部、中部、西部等不同区域不宜普适推广。笔者聚焦国家急需的量大面广部分断面掘进机(悬臂式、连采式、掘锚式,简称掘进机)所面临的智能化快速掘进问题开展研究。
由于数字孪生技术仅能依据物理实体的实际数据预测其未来的变化,或基于专家经验提出针对某一特定场景的优化方案,无法评估多种方案、多种参数下的系统表现,导致其优化控制容易陷入局部最优。为了更有效、更全面的实施煤矿井下的安全快掘工作,在极其复杂的掘进工作面生产系统中生成大量场景,并在试错实验中涌现分析出系统的全局最优控制方案,自适应地进行优化控制,提出了平行掘进系统(Parallel Tunneling System)的概念、关键技术、技术架构及其方法。基于新时代3个世界对应的3类哲学,经典哲学讨论的Being,过程哲学讨论的Becoming以及人工世界重要的Believing,王飞跃于1994年即提出影子系统的思想,并于2004年的“平行系统方法与复杂系统的管理与控制”一文中为应对复杂系统难以建模与实验不足等问题,提出了平行系统的思想,试图用一种适合复杂系统的计算理论与方法解决社会经济系统中的重要问题,其主要观点是利用大型计算模型、预测并诱发引导复杂系统现象,通过整合人工社会、计算实验和平行系统等方法,形成新的计算研究体系。
1 当前煤矿掘进的现状及分析
针对掘进工作面的掘进割煤、临时支护、钻孔锚固这3个控制流程,当前掘进工作面的技术现状是根据不同的掘进装备特点采用不同的作业过程,如图1所示。

图1 悬臂式、连采机、掘锚式等巷道掘进过程
Fig.1 Cantilever type,continuous mining machine,anchor type roadway excavation process
面对上述技术现状存在的掘进工况的多场景、掘进装备的多设备、掘进过程的多联动等特性,智能掘进技术必须具备掘-支-锚群体设备联动协同作业特点,如图2所示。

图2 掘-支-锚群体设备协同系统
Fig.2 Collaborative system of excavation-bolt-anchor group equipment
目前,虽然智能掘进技术已取得了一些进步,提出了护盾式、掘锚式等掘-支-锚多装备的样机设计,但从设备适用性及装备配套性角度,仍存在个体装备设计不严谨、样机改型成本高、装备控制不精准、巷道场景多样不适应、群体设备难一致协同等诸多问题,如图3所示。
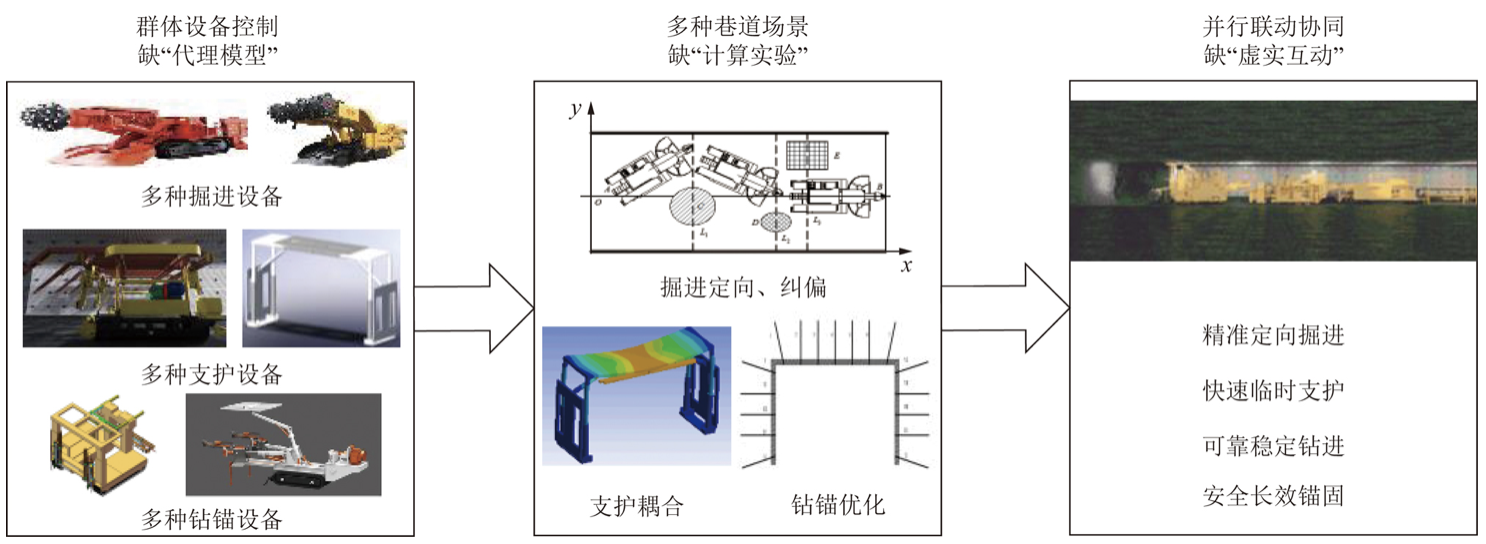
图3 掘-支-锚群体设备协同系统需解决问题
Fig.3 Synergistic system of excavation-bolt-anchor group equipment needs to solve the problem
造成上述问题的首要原因是缺少煤矿特殊生产环境下群体设备联动协同控制的基础理论研究,主要表现为对智能掘进所需的设备模型、场景实验、数据驱动等基础理论缺少研究,具体存在以下问题:
1.1 群体设备控制缺“代理模型”
综掘工作面智能化进展缓慢,其主要制约因素是工作面环境恶劣(瓦斯、高温、高湿、高粉尘等环境因素与冒顶、片帮、底臌等安全因素的交互作用)、空间狭小(狭长封闭空间)、装备繁多(掘进机、临时支架、钻锚设备等),缺少能够表征巷道复杂环境、群体掘进设备、围岩压力特性等物理世界的人工模型,无法合理的指导装备设计与研发、掘进过程的控制与优化。其中智能掘进包含多个掘进装备,单个掘进装备由于其具有感知、规划和决策能力,而其独立装备的软硬件平台也是由多个复杂的模块构成,非常适合使用代理模型的“Agent”技术对其进行建模,用于处理类似多传感器数据融合、多规划任务调度和多决策优化等任务,从而保证系统可靠工作。
1.2 多种巷道场景缺“计算实验”
快掘扰动下巷道围岩失稳机制和变形破坏机理,以及应力分布与演变规律,需要揭示快掘巷道围岩与临时支架应力耦合机理,是强度高、结构紧凑、敏捷高效的临时支护装备设计和快掘巷道可靠临时支护实现的基础和依据,钻孔网络的优化设计对于锚固质量的控制起到关键作用,综上,巷道掘进环境的不可预测与不可假设实验,基于支护安全等考虑,缺失各类掘进场景下的掘进截割、支护验证、锚固优化等计算实验,不能有效可靠完成智能掘进的支护、锚固最优技术实现。因此,依据不同地质条件、巷道环境约束与复杂特性开展地质围岩耦合压力计算实验,包括截割扰动带来的空顶下顶板压力计算、临时支护静动应力计算、钻锚网络优化与拓扑计算实验等。
1.3 并行联动协同缺“虚实互动”
依据智能掘进的掘-支-锚群体设备协同控制要素中构建的人工模型,开展了各种巷道场景下的计算实验,获取了可优化控制解,但人工模型毕竟与物理世界有多种因素的差异,需要实际工作场景的实时数据孪生,才能完成智能掘进的模型计算与数据驱动的平行控制,因此,缺失虚实互动的数据与模型交互,不能实现智能掘进设备与控制的滚动优化。完成平行掘进的计算场景与掘-支-锚群体物理设备的控制数据之间的动态交互,构建数据实时通信网络及高性能计算平台。
国外在煤巷掘进中试验截割、支护平行作业方式联合作业机组,连续采煤机和掘锚一体机已在澳大利亚、美国等国家使用,实际应用效果较好。德国艾柯夫公司CM2H-37型连续采煤机,2016年在南非煤巷开拓中表现优异,整机可靠性高,掘进速度快。在西欧海尔布隆矿场应用的山特维克公司MB770 FLP型掘锚机,具有自动化截割和半自动化锚杆支护功能,大大缩短了掘进周期。美国久益环球公司2019年在波兰Budryk煤矿开始运营的12CM30型掘锚机,适用于中厚煤层,采用Faceboss控制平台,可以实现同时截割和锚固[5-8]。
但受限于国外煤炭开采规模和能源结构,国外煤矿智能掘进研究近年来进展不明显,掘进机装备智能化相关研究发展停滞,对于智能掘进群体设备联动控制技术,尤其在掘进-支护-锚固协同一体化基础理论研究上没有突出成果。
2 基于ACP理论的平行控制方法及国内外研究现状
平行系统的本质就是把复杂系统中“虚”和“软”的部分,通过可定量、可实施、可重复、可实时的计算实验,使之硬化,以解决实际复杂系统中不可准确预测、难以拆分还原、无法重复实验等问题。杨林瑶等[10]提出平行系统是由物理子系统、描述子系统、预测子系统、引导子系统构成的数字4胞胎架构,平行系统原理如图4所示。

图4 平行系统原理
Fig.4 Schematic diagram of parallel system
平行系统的核心是ACP方法[11-13],主要由3部分完成:① 人工系统(A):由实际系统的数据驱动,借助系统机理、知识表示与机器学习等手段,针对实际系统中的各类元素和问题,构建可计算、可重构、可编程的软件定义的对象、软件定义的流程、软件定义的关系等,进而将这些对象、流程、关系等组合成软件定义的人工系统,利用人工系统对复杂系统问题进行建模;② 计算实验(C):基于人工系统这一“计算实验室”,利用计算实验,设计各类智能体的组合及交互规则,产生各类场景,运行产生完备的场景数据,并借助机器学习、平行动态规划、数据挖掘等手段,对数据进行分析,求得各类场景下的最优策略;③ 平行执行(P):将人工系统与实际系统同时并举,通过一定的方式进行虚实互动,以平行执行引导和管理实际系统。从流程上而言,平行系统通过数据获取、人工系统建模、计算实验场景推演、实验解析与预测、管控决策优化与实施、虚实系统实时反馈、实施效果实时评估来完成闭环处理过程。王飞跃教授提出了平行控制应用于复杂系统优化问题基本框架[14]。笔者在此基础上将平行理论与掘进体系相结合构建的基于ACP的平行掘进系统架构体系如图5所示。

图5 基于ACP的平行掘进系统架构体系
Fig.5 Parallel tunneling system architecture based on ACP
从流程上而言,平行系统通过开源数据获取、人工系统建模、计算实验场景推演、实验解析与预测、管控决策优化与实施、虚实系统实时反馈、实施效果实时评估的闭环处理过程,实现从实际系统的“小数据”输入人工系统,基于博弈、对抗、演化等方式生成人工系统“大数据”,再通过学习与分析获取针对具体场景的“小知识”,并通过虚实交互反馈逐步精细化针对当前场景的“精准知识”的过程。
随着智能矿山需要实现智能掘进快速、安全、高效的目标越来越迫切,亟需突破制约掘-支-锚群体设备协同控制方法的理论与技术瓶颈。
掘-支-锚平行控制模型与方法的研究正是实现智能掘进群体设备协同控制方法的理论基础与关键环节,如图7所示,其中,学习与培养描述智能、实验与评估预测智能和管理与控制引导智能皆属于计算实验的部分,相互合作反馈。
基于此,下面从平行控制方法的智能体建模、计算实验、数据驱动的平行控制等方面,分析国内外研究现状与发展动态。
(1)平行控制中的智能体建模研究。对复杂系统进行建模时,目前,人工系统建模的主要手段就是智能体建模(Agent Programming),其主要特征就是集自主性、交互性、学习与进化自适应能力等于一身,使之成为建模的基本元素[15]。智能体(Agent),又称代理系统,是在20世纪80年代中期兴起的属于分布式人工智能的一个概念。当前,智能体系统的成功使得分布式人工智能(Distributed Artificial Intelligent,DAI)有了更加现代化的定义:多智能体系统的研究、构建和应用。
空中交通控制和冲突管理系统是智能体技术最先应用的几个领域,在智能交通系统的研究领域里,越来越多的研究者将智能车建模为智能体[16] CRONOS,OPAC,SCOOT,SCAT,PRODYN,RHODES[17-19]等交通控制系统。在智能体系统建模的基本要素方面,从任务类型上可被看作为由感知[20]、规划[21]和决策[22]多个智能体组成的异构智能体混合系统。具体实例在智能车建模方法上,利用车载激光雷达、深度相机等感知模型状态、环境约束等综合信息[23],完成换道、避障等决策,与云端交互实时数据完成共享信息。
(2)多场景计算实验研究。对复杂系统进行计算实验时,目前使用的计算实验方法主要是指优化计算实验,即快速、高效地确定影响实验结果的最优实验条件[24],同时考虑到计算实验融合多主体建模、博弈论等理论方法,通过“自下而上”建模来刻画复杂系统中各要素的动力学特征及主体间的动态交互,被认为是复杂系统的涌现行为及演化规律研究的有效方法[25-26]。解决了计算实验存在的标定、设计、分析和验证等问题[27]。与此同时,计算实验也必须遵循复制(replication),随机化(randomization)和分块化(blocking)的3个实验设计的基本原理[28]。计算实验方法也为我国学者提出的综合集成法[29]和综合集成研讨厅体系[30]提供一种经济快速、“虚”实结合进行复杂系统行为分析和决策评估的有效手段。
优化计算方法已经开始应用于城市公共交通和城市建设等方面,为解决城市交通行驶和排车等问题,可以利用人工交通社会的方法[31],利用计算实验方法进行量化分析和检验。同时,面向制造业关心的产品设计、决策、故障检测、诊断等问题涌现了一些数字孪生的方法研究[32-37],例如WANG等[38]开发了一种用于精准配准的数字孪生方法;YERATAPALLY等[39]对铝合金材料断裂问题进行研究,使用数字孪生建构了微观结构的多尺度框架模型,对影响疲劳寿命的可观察之前的材料损伤累积进行了预测,并发展了一种基于诊断树的健康管理方法。
(3)虚实互动的平行控制研究。虚实互动的平行控制研究主要是在社会物理信息系统(Cyber Physical Social Systems,CPSS)下对复杂系统进行多模态感知,进而构建各类软件定义的多尺度复杂系统,并在计算机中完成对实际复杂系统的解析、建模。利用软件定义的人工系统利用计算实验的方法进行实验、预测、自学习、自优化,并反馈到实际系统和人工系统中,进而完成对复杂系统的控制,实现虚实互动的平行智能[40]。
虚实互动的平行控制研究在交通、物流、能源、医疗健康、机器人、区块链等领域得到了广泛应用[41]。在交通领域,刘腾等[42]提出基于ACP方法的智能车智能指挥与控制系统,即平行驾驶系统,并指出智能车指挥与控制系统实验平台的构成。在物流领域,郑松等[43]采用数据引擎作为人工社会中的基本计算单元,研究自动化集装箱码头信息控制系统,得出数据引擎技术是实现平行系统的有效办法。在能源领域,邓建玲等[44]指出只有利用虚拟人工模型,采用平行系统,才能建立能源5.0。并明确指出能源5.0核心是构建与实际能源系统同构的虚拟人工能源系统,通过虚拟人工能源系统的计算实验,确定优化控制策略。在医疗健康领域,张梅等[45]提出平行手术,即采用人工场景模拟医生和患者情况通过虚实互动的平行执行功能在线优化手术方案。邱天雨等[46]则提出通过构建人工痛风诊疗系统以模拟和表达实际痛风治疗系统。在机器人领域,白天翔等[47]将平行系统思想与机器人领域结合,为无人机、无人车、无人船在复杂环境中实验、学习与工作提供安全的平台。在区块链领域,袁勇、王飞跃[48]提出通过实际区块链与人工区块链系统的平行互动与协同演化,为目前的区块链技术增加计算实验与平行决策功能。
开展平行理论与智能掘进相关联的基础理论及创新应用研究,虽然存在一些受限条件,掘进系统的代理模型及人工系统建模环节需要涵盖完整的煤矿井下巷道掘进场景才能保证安全性,不足的是当前数据集尽管规模很庞大,但却并不能满足方案与场景多样性的需求。原因在于巷道环境复杂多样,在这样的环境下要实现快速、准确、可靠的环境感知,需要采集大规模多样性数据,导致数据采集阶段需要大量的人力工作;另一方面,由于巷道下的环境复杂异变,因此对大规模的多样性数据进行标定比较困难且容易出错,无法保证数据集的有用性。但在煤矿F5G打通信息传递通道,并且掘-支-锚一体化关键技术日益发展的研究阶段,开展平行理论与智能掘进的交叉应用研究很有理论可行性与技术必要性。
本文提出智能掘进复杂系统的掘-支-锚平行控制理论与方法研究,针对巷道复杂环境下的群体设备离散控制现状,运用整体系统论的方法,完成掘进系统的掘进、支护、钻锚群体设备代理模型的构建,根据多场景下复杂系统的计算实验克服掘进巷道环境复杂、恶劣的工程验证难题,最终实现智能掘进平行控制方法的理论创新与方法验证。
3 平行掘进的关键技术
3.1 整体方案
本文以智能掘进复杂系统为研究对象,重点考虑掘-支-锚系统的整体控制理论与方法,结合智能化掘进相关研究基础和方法,融入当前国内外复杂系统研究的最新科研进展,基于平行控制基础理论及ACP(Artificial,Computing,Parallel)方法框架,运用代理控制理念及自适应动态规划多智能体研究方法,开展智能掘进复杂系统的掘-支-锚平行控制基础理论与方法研究。平行掘进解决方案如图6所示。

图6 平行掘进解决方案
Fig.6 Parallel tunneling solution
平行掘进系统的构建关键是利用信息技术对掘进系统中的各个独立智能体(子系统)及掘进机纠偏智能体、掘进机截割智能体、临时支护智能体、钻锚机智能体、掘支协同智能体与支锚协同智能体的关键动态属性进行数据采集;利用现代通信技术将各个采集点的数据进行实时传输;利用数字建模、虚拟技术、可视化技术、可视计算等方法建立与现实相对应的人工掘进系统,将各采集点的数据实时导入人工掘进系统,使得人工系统成为与现实系统相对应的平行系统;在平行系统中利用各种智能算法、优化算法对现实中的掘进系统的掘进作业进行预测、优化并将结果反馈给现实系统,从而实现对现实掘进系统的优化控制与ACP闭环方法。
3.2 平行掘进的关键技术体系
3.2.1 智能掘进复杂系统智能体(Agent)建模与验证
(1)确定智能掘进复杂系统的基本元素,包括巷道环境、掘进设备、人员认知3个主要集合,开展多智能体的结构、功能、关系分级建模,第1步根据智能掘进的设备主要素,建立掘进、临时支护、钻锚三大设备智能体模型。智能体的工程仿真如图7所示。
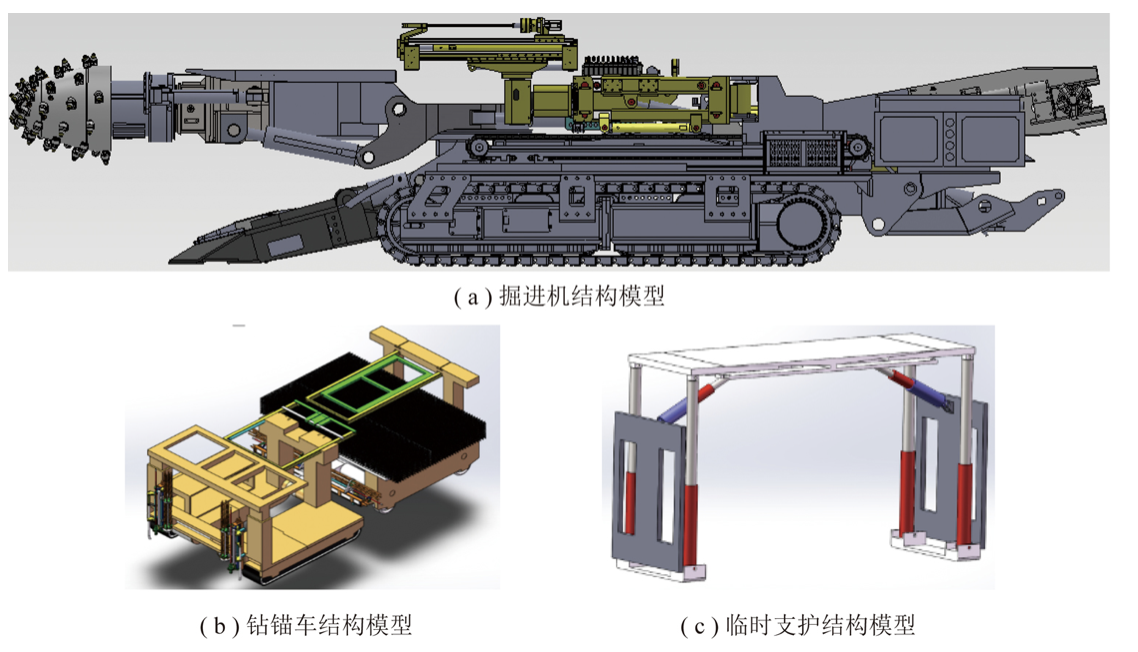
图7 智能体工程仿真
Fig.7 Engineering simulation diagram of agent
(2)根据智能体的行为差异,其组成还有不同分级代理模型,见表1,基于代理编程理念的智能体建模有利于面向实例的元素、空间、交互等通信机制。根据掘进巷道认知的空间尺寸、煤岩截割硬度、断面成型条件、底板路面条件、围岩压力规律和钻孔网络拓扑等环境描述数据建立认知数据库。
表1 智能体的组成
Table 1 Composition of an agent

(3)确定掘-支-锚多智能体的行为集合,根据单体行为和群体行为分别建立不同的行为特征模型,构建掘进机的截割行为、定位行为、纠偏行为特征模型,应包含机构控制Agent、负载交互Agent、定位传感Agent和履带纠偏Agent,依次完成临时支护行为、钻孔锚固行为特征模型与行为判断依据,在此基础上,还要建立行为交互Agent,如截割负载引起的机身径跳、履带侧滑等偏差行为,临时支护与钻孔空间资源竞争的行为Agent,支护初撑力与围岩耦合的响应行为Agent。
(4)提出无模型、自学习、数据驱动的多智能体强化学习方法(Multi Agent Reinforcement Learning,MARL)建模,通过强化学习智能体与被控对象在闭环系统中不断进行交互,观察掘进巷道环境的实时状态提取信号控制所需要的智能掘进复杂系统状态信息和反馈奖励信息,以累计回报收益最大为建模验证目标。
3.2.2 随机约束下多场景掘-支-锚人工模型计算实验
在微观精细化分级构建代理模型的基础上,涌现各类因设备控制、环境变化、人机交互等宏观现象,并通过与实际掘进系统的物理实体对比交互,不断培育和优化智能掘进代理模型系统,研究掘-支-锚多智能体的人工模型计算实验标定问题,主要包括单个智能体行为模型的标定,巷道环境模型的标定和智能体行为交互与生长培育规则的标定,具体涉及到掘进感知、决策、控制行为的模型标定,掘进定位定向控制、临时支护围岩压力耦合关系的模型标定以及钻孔优化和锚固质量的评价准则标定,从而能对物理实体与智能体人工模型在定性和定量上确定相似性可信度。
通过快速精准掘进与安全高效支护为目标驱动,以可控因素与涌现因素为事件驱动。构建智能掘进代理系统的计算实验基本框架,如图8所示。其中,xi和yj分别为智能掘进代理模型系统的输入与输出,i=1,2,…,m,j=1,2,…,n;uk和vl分别为影响人工系统的可控因素或决策与不可控因素或事件,k=1,2,…,p,l=1,2,…,q。

图8 智能掘进代理系统的计算实验基本框架
Fig.8 Basic framework of computational experiment of intelligent tunneling agent system
笔者团队在掘进机、钻锚机运动学计算实验、巷道空间运动学约束及围岩压力动力学计算实验方面建立了掘进机截割头正向运动学(DKP)模型[49],如图9所示。将掘进机的机械机构建模为一系列平移或旋转关节串联而成的运动链,其中,a1,a2为机构间的宽距;d2,d3分别为掘进支架的高度与掘进机结构头的长度;θ2,θ3为旋转结构的旋转角;XYZ为三维坐标轴;O1为掘进机回转台回转中心;O2为截割臂升降摆动中心。

图9 掘进机截割头正向运动学(DKP)模型
Fig.9 Forward kinematics (DKP) model of roadheader cutting head
上述模型中假定已知大地坐标系OXYZ和测量坐标系Oc Xc Yc Zc。依照坐标变换理论,掘进机坐标系O0X0Y0Z0由测量坐标系Oc Xc Yc Zc经4个步骤变换得到:先绕Zc轴旋转α角,然后绕Yc轴旋转β角,再绕Xc轴旋转γ角,最后沿O0Oc平移矢量A(dx,dy,dz)。图10为截割头空间极限位置数学模型[49],其中X1为掘进机掘进方向,P点为截割头所在位置。弧Plu,Psu为截割臂在最高点以width=20,height=17,dpi=110为圆心旋转而成的左右极限位置;弧Pld,Psd为截割臂在最低点以O′1为圆心旋转而成的左右极限位置。曲面 Plu Psu Pld Psd为截割头在机身位姿正确时截割的最大断面。

图10 截割头空间极限位置数学模型
Fig.10 Mathematical model of spatial limit position of cutting head
运用D-H方法分别建立钻锚车顶的坐标系,并得到其运动学模型[50],如图11所示。

图11 钻锚车顶钻臂的运动学模型
Fig.11 Kinematics model of drill arm on drill anchor roof
基于蒙特卡洛伪随机数方法的钻锚车钻臂的适用性工作空间计算实验[50],分析了钻锚车钻臂适用的巷道尺寸范围及运动空间约束关系,如图12所示,并得到根据巷道尺寸范围设计钻锚的方法。
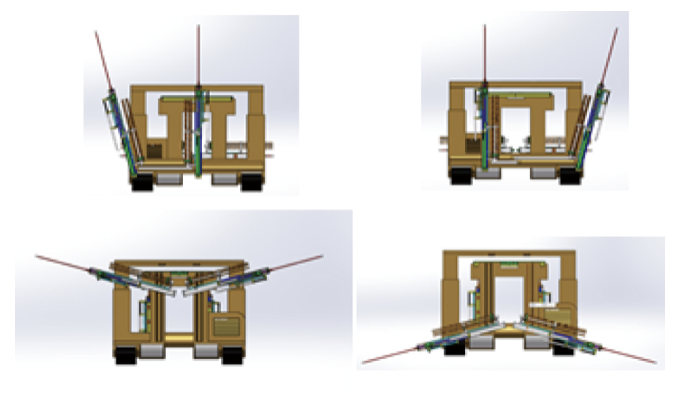
图12 钻锚车钻臂的适用性工作空间计算实验仿真
Fig.12 Calculation experiment of applicability workspace of drill arm of drill anchor truck
钻锚装备的计算实验中构建了支护质量代理模型[51],如图13所示,分析实际巷道的顶板和底板围岩性状在代理模型计算实验中的近似效果。

图13 基于静态代理模型获得最优锚护网络的断面分布和位移云图
Fig.13 Based on the static agent model,the section distributionand displacement nephogram of the optimal anchor protection network are obtained
根据智能掘进代理系统计算实验,需要完成:① 决定哪些影响智能掘进的可控和涌现因素对系统的输出最有影响;② 决定如何设置有影响的可控因素us以便使系统的输出接近希望的目标;③ 决定如何设置有影响的可控因素us以便使输出的动态变化波动小;④ 决定如何设置有影响的可控因素us以便使不可控的因素变量vs的作用最小。
最后,利用并行计算的完成多智能体的机理模型、经验模型以及基于智能掘进认知的单体模型、组织模型及人机交互模型的计算实验,建立离散化方法和任务调度方法,实现多场景多任务的掘进复杂系统大规模计算实验。
3.2.3 数据驱动下虚实交互平行掘进控制方法
首先,建立基于虚实数据交互机制的智能掘进平行系统,通过3.2.2节中阐述的计算实验的最优方案与策略,利用基于代理控制(Agent-Based Control,ABC)方法,构建智能掘进代理系统的决策处理模块,具体建立估计模块、仲裁模块和控制融合模块,通过估计模块对智能掘进代理模型系统状态的估计与对实际智能掘进控制器的内部状态划分,辅助控制代理模型做出行为决策。
然后根据掘-支-锚多智能体的行为Agent的判决,具体涉及空间及动力学计算结果,由仲裁模块选择代理模型的执行优先级。同时,以多目标优化及系统协同联动的控制目标,建立智能掘进多智能体代理系统的多目标优化控制策略。
4 平行掘进的技术难点
(1)异构异源复杂系统的代理模型与物理模型的可信度分析。智能掘进系统因其掘-支-锚的行为一致性、巷道地质及围岩压力复杂性,其整体具备不可分与不可知的复杂系统属性,如何根据实体与模型映射的“简单的一致”原理,从对简单对象的确定行为及其行为间相互作用的基本一致的认识出发,如何通过综合集成,从行为生成的角度出发,自下而上地建立异构异源复杂系统的代理模型;又如何充分考虑物理模型的主动性和随机性,分析两者间的相似性可信度。
(2)复杂系统的行为与约束涌现机制的分析与评估。智能掘进复杂系统的非结构环境下煤岩截割、支护围岩压力耦合、钻锚空间拓扑与网络优化等的随机性、不可知性,如何利用人为因素的评价依据来构建符合涌现机理的设备行为与随机约束下的计算实验,如何评测计算实验的可信性,如何评估建立决策机制的可行性。
(3)复杂系统平行控制的运行机制与实现。如何利用智能掘进复杂系统代理模型和计算实验方法,通过物理系统与代理模型的交互运行和过程演绎,构成“平行系统”,如何基于数据驱动的交互协议与接口,开展平行系统的对比、借鉴、实验,进而如何施行“平行执行”,最后如何在实行复杂系统的智能化控制和管理的滚动优化原则下,建立复杂系统研究的决策方式和方法体系。
5 结论与展望
(1)对智能掘进复杂系统论的理论研究,由过去离散的掘进、支护、钻锚控制环节研究,提出智能掘进掘-支-锚复杂系统的整体性控制论研究。对平行控制理论的场景应用特色,提出了智能掘进的平行控制模型与方法,实现平行掘进的控制理论对于无人化智能掘进的指导作用,即通过对构建的代理模型与巷道空间运动学、代理模型与围岩压力动力学计算实验,完成智能操控。
(2)提出智能掘进复杂系统的掘-支-锚代理模型研究,突破现有串行掘进时序控制技术的限制,切实解决限制掘进效率的掘-支-锚离散控制方法瓶颈。
(3)开展随机约束下多场景掘-支-锚人工模型计算实验设计,有效克服现有掘进环境恶劣,不确定约束环节下的工程验证不可实现性。
(4)需要进一步通过掘进物理系统与掘进代理模型的交互运行和过程演绎,验证智能掘进的平行系统理论,基于数据驱动的交互协议与接口,开展平行系统的对比、借鉴、实验,从而施行“平行执行”,实现复杂系统的智能化控制和管理的滚动优化。
参考文献:
[1] | 杨生华,芮丰,蒋卫良,等.煤矿全断面岩巷掘进机开发应用与发展[J].煤炭科学技术,2019,47(6):1-10. YANG Shenghua,RUI Feng,JIANG Weiliang,et al.Development and application of full-section rock tunneling boring machine in coal mine[J].Coal Science and Technology,2019,47(6):1-10. |
[2] | 刘泉声,黄兴,时凯,等.煤矿超千米深部全断面岩石巷道掘进机的提出及关键岩石力学问题[J].煤炭学报,2012,37(12):2006-2013. LIU Quansheng,HUANG Xing,SHI Kai,et al.Utilization of full face roadway boring machine in coal mines deeper than 1 000 km and the key rock mechanics problems[J].Journal of China CoalSociety,2012,37(12):2006-2013. |
[3] | 陶云飞.掘进机位姿激光自动测量方法及系统研究[D].北京:中国矿业大学(北京),2017. TAO Yunfei.Research on automatic measurement method and system of position and attitude of roadheader based on laser measurement system[D].Beijing:China University of Mining and Technology(Beijing),2017. |
[4] | 吴淼,贾文浩,华伟,等.基于空间交汇测量技术的悬臂式掘进机位姿自主测量方法[J].煤炭学报,2015,40(11):2596-2602. WU Miao,JIA Wenhao,HUA Wei,et al.Autonomous measurement of position and attitude of boom-type roadheader based on space intersection measurement[J].Journal of China Coal Society,2015,40(11):2596-2602. |
[5] | ACAROGLU O,ERDOGAN C.Stability analysis of roadheaders with mini-disc[J].Tunnelling and Underground Space Technology,2017,68(10):187-195. |
[6] | SNYDER V W,KROHN R L.An experimental study of beam building mechanisms using fully grouted bolts in bedded mine rock[J].Developments in Geotechnical Engineering,1981,32:234-236 |
[7] | ROY S,RAJAGOPALAN A B.Analysis of rockbolt reinforcement using beam-column theory[J].International Journal for Numerical and Analytical Methods in Geomechanics,1997,21(4):241-253. |
[8] | TEYMEN A,KILIC A.Effect of grout strength on the stress distribution (tensile) of fully-grouted rockbolts[J].Tunnelling and Underground Space Technology,2018,77:280-287. |
[9] | 张娜,李建斌,荆留杰,等.TBM掘进参数智能控制系统的研究与应用[J].隧道建设,2018,38(10):150-156. ZHANG Na,LI Jianbin,JING Liujie,et al.Study and application of intelligent control system of tbm tunneling parameters[J].Tunnel Construction,2018,38(10):150-156. |
[10] | 杨林瑶,陈思远,王晓,等.数字孪生与平行系统:发展现状、对比及展望[J].自动化学报,2019,45(11):2001-2031. YANG Linyao,CHEN Siyuan,WANG Xiao,et al.Digital twins and parallel systems:State of the art,comparisons and prospect[J].Acta Automatica Sinica,2019,45(11):2001-2031. |
[11] | 王飞跃,张梅,孟祥冰,等.平行眼:基于ACP的智能眼科诊疗[J].模式识别与人工智能,2018,31(6):495-504. WANG Feiyue,ZHANG Mei,MENG Xiangbing,et al.Parallel eyes:An ACP-based smart ophthalmic diagnosis and treatment[J].Pattern Recognition and Artificial Intelligence,2018,31(6):495-504. |
[12] | 王飞跃.平行控制:数据驱动的计算控制方法[J].自动化学报,2013(4):293-302. WANG Feiyue.Parallel control:A method for data-driven and computational control[J].Acta Automatica Sinica,2013(4):293-302. |
[13] | 宁滨,王飞跃,董海荣,等.基于ACP方法的城市轨道交通平行系统体系研究[J].交通运输系统工程与信息,2010(6):22-28. NING Bin,WANG Feiyue,DONG Hairong,et al.Parallel systems for urban rail transportation based on ACP approach[J].Journal of Transportation Systems Engineering and Information Technology,2010(6):22-28. |
[14] | 王飞跃,魏庆来.智能控制:从学习控制到平行控制[J].控制理论与应用,2018,35(7):56-65. WANG Feiyue,WEI Qinglai.Intelligent control:From learning control to parallel control[J].Control Theory and Application,2018,35(7):56-65. |
[15] | 冯珊,唐超闵,君沈冲.用于复杂系统建模与仿真的面向智能体技术[J].管理科学学报,1999(2):73-78,91. FENG Shan,TANG Chaomin,JUN Shenchong.Agent oriented technology for modeling and simulation of complex systems[J].Journal of Manegement Sciences in China,1999(2):73-78,91. |
[16] | 吴青.探究人工智能技术在空中交通管理中的应用[J].智库时代,2018,165(49):172-173. WU Qing.Explore the application of artificial intelligence technology in air traffic management[J].Think Tank Era,2018,165(49):172-173. |
[17] | WANG F Y,TANG S.Toward intelligent transportation systems for the 2008 Olympics[J].IEEE Intelligent Systems,2003,18(6):8-11. |
[18] | PAPAGEORGIOU M,DIAKAKI C,DINOPOULOU V,et al.Review of road traffic control strategies[J].Proceedings of the IEEE,2004,91(12):2043-2067. |
[19] | MIRCHANDANI P,WANG F Y.Rhodes to intelligent transportation systems[J].IEEE Intelligent Systems,2005,20(1):10-15. |
[20] | 陈无畏,王檀彬,焦俊,等.基于信息融合的多智能体混合体系智能车辆导航[J].农业机械学报,2011,42(6):1-5. CHEN Wuwei,WANG Tanbin,JIAO Jun,et al.Design and application for navigation multi-agent of intelligent vehicle based on information fusion[J].Transactions of the Chinese Society for Agricultural Machinery,2011,42(6):1-5. |
[21] | 田磊,赵启伦,董希旺,等.异构多智能体系统分组输出时变编队跟踪控制[J].航空学报,2020,41(7):301-312. TIAN Lei,ZHAO Qilun,DONG Xiwang,et al.Time-varying output group formation tracking for heterogeneous multi-agen systems[J].Acta Aeronautica et Astronautica Sinica,2020,41(7):301-312. |
[22] | 徐杨,王晓峰,何清漪.物联网环境下多智能体决策信息支持技术[J].软件学报,2014,25(10):2325-2345. XU Yang,WANG Xiaofeng,HE Qingyi.Internet of things based information support system for multi-agent decision[J].Journal of Software,2014,25(10):2325-2345. |
[23] | 陆峰,徐友春,李永乐,等.基于信息融合的智能车障碍物检测方法[J].计算机应用,2017,37(S2):115-119. LU Feng,XU Youchun,LI Yongle,et al.Obstacle detection method based on fusion information[J].Journal of Computer Applications,2017,37(S2):115-119. |
[24] | 王飞跃,杨柳青,胡晓娅,等.平行网络与网络软件化:一种新颖的网络架构[J].中国科学:信息科学,2017,47(7):811-831. WANG Feiyue,YANG Liuqing,HU Xiaoya,et al.Parallel networks and network softwareization:A novel network architecture[J].Scientia Sinica(Informations),2017,47(7):811-831. |
[25] | 盛昭瀚,张维.管理科学研究中的计算实验方法[J].管理科学学报,2011,14(5):1-10. SHENG Zhaohan,ZHANG Wei.Computational experiments in management science and research[J].Journal of Management Sciences in China,2011,14(5):1-10. |
[26] | 杨涛,张力菠.基于计算实验的光伏电站质量优化利益分配[J].系统工程,2016(11):139-146. YANG Tao,ZHANG Libo.Revenue-share under quality optimization of solar PV power plant based on computational experiment[J].Systems Engineering,2016(11):139-146. |
[27] | 王飞跃.计算实验方法与复杂系统行为分析和决策评估[J].系统仿真学报,2004,16(5):893-897. WANG Feiyue.Computational experiments for behavior analysis and decision evaluation of complex systems[J].Journal of System Simulation,2004,16(5):893-897. |
[28] | MONTGOMERY.Design and analysis of experiments[M].Montgomery:Wiley,2006. |
[29] | 戴汝为,王珏.关于智能系统的综合集成[J].科学通报,1993,38(14):1249-1256. DAI Ruwei,WANG Jue.About the integrated integration of intelligent systems[J].Chinese Science Bulletin,1993,38(14):1249-1256. |
[30] | 李耀东,崔霞,戴汝为.综合集成研讨厅的理论框架,设计与实现[J].复杂系统与复杂性科学,2004,1(1):27-32. LI Yaodong,CUI Xia,DAI Ruwei.The framework,design & implementation of hall for workshop of meta-synthetic engineering[J].Complex Systems and Complexity Science,2004,1(1):27-32. |
[31] | 王飞跃,汤淑明.人工交通系统的基本思想与框架体系[J].复杂系统与复杂性科学,2004(2):52-59. WANG Feiyue,TANG Shuming.Concepts and frameworks of artificial transportation systems[J].Complex Systems and Complexity Science,2004(2):52-59. |
[32] | BOOYSE W,WILKE D N,HEYNS S.Deep digital twins for detection,diagnostics and prognostics[J].Mechanical Systems and Signal Processing,2020,140(6):106612. |
[33] | LESER P E,WARNER J E,LESER W P,et al.A digital twin feasibility study (Part II):Non-deterministic predictions of fatigue life using in-situ diagnostics and prognostics[J].Engineering Fracture Mechanics,2020,229:106903. |
[34] | MEIERHOFER J,WEST S.Data driven decision support by digital twins in manufacturing[A].2020 7th Swiss Conference on Data Science (SDS)[C].IEEE,2020:53-54. |
[35] | 白仲航,孙意为,许彤,等.基于设计任务的概念设计中产品数字孪生模型的构建[J].工程设计学报,2020,27(6):1-9. BAI Zhonghang,SUN Yiwei,XU Tong,et al.Construction of product digital twin model based on design task in conceptual design[J].Chinese Journal of Engineering Design,2020,27(6):1-9. |
[36] | 陈继文,魏文胜,李鑫,等.基于数字孪生的工程机械产品健康检测方法研究[J].中国工程机械学报,2020,18(4):371-376. CHEN Jiwen,WEI Wensheng,LI Xin,et al.Health detection method of construction machinery products based on digital twins[J].Chinese Journal of Construction Machinery,2020,18(4):371-376. |
[37] | 王峻峰,张玉帆,邵瑶琪,等.面向生产性能数字孪生的仿真数据映射研究[J].系统仿真学报,2021,31(3):1-7. WANG Junfeng,ZHANG Yufan,SHAO Yaoqi,et al.Research on simulation data mapping for production performance digital twin[J].Journal of System Simulation,2021,31(3):1-7. |
[38] | WANG K,LIU D,LIU Z,et al.An assembly precision analysis method based on a general part digital twin model[J].Robotics and Computer-Integrated Manufacturing,2021,68:102089. |
[39] | YERATAPALL S R,LESER P E,HOCHHALTER J D,et al.A digital twin feasibility study (Part I):Non-deterministic predictions of fatigue life in aluminum alloy 7075-T651 using a microstructure-based multi-scale model[J].Engineering Fracture Mechanics,2020,228:106888. |
[40] | 吕宜生,陈圆圆,金峻臣,等.平行交通:虚实互动的智能交通管理与控制[J].智能科学与技术学报,2019,1(1):21-33. LÜ Yisheng,CHEN Yuanyuan,JIN Junchen,et al.Parallel transportation:Virtual-real interaction for intelligent traffic management and control[J].Chinese Journal of Intelligent Science and Technology,2019,1(1):21-33. |
[41] | 王晓,要婷婷,韩双双,等.平行车联网:基于ACP的智能车辆网联管理与控制[J].自动化学报,2018,44(8):1391-1404. WANG Xiao,YAO Tingting,HAN Shuangshuang,et al.Parallel internet of vehicles:The ACP-based networked management and control for intelligent vehicles[J].Acta Automatica Sinica,2018,44(8):1391-1404. |
[42] | 刘腾,于会龙,田滨,等.智能车的智能指挥与控制:基本方法与系统结构[J].指挥与控制学报,2018,4(1):22-31. LIU Teng,YU Huilong,TIAN Bin,et al.Intelligent command and control systems for intelligent vehicles:Primary methods and systemic construction[J].Journal of Command and Control,2018,4(1):22-31. |
[43] | 郑松,吴晓林,王飞跃,等.平行系统方法在自动化集装箱码头中的应用研究[J].自动化学报,2019,45(3):48-62. ZHENG Song,WU Xiaolin,WANG Feiyue,et al.Applying the parallel systems approach to automatic container terminal[J].Acta Automatica Sinica,2019,45(3):48-62. |
[44] | 邓建玲,王飞跃,陈耀斌,等.从工业4.0到能源5.0:智能能源系统的概念、内涵及体系框架[J].自动化学报,2015,41(12):2003-2016. DENG Jianling,WANG Feiyue,CHEN Yaobin,et al.From industries 4.0 to energy 5.0:Concept and framework of intelligent energy systems[J].Acta Automatica Sinica,2015,41(12):2003-2016. |
[45] | 王飞跃,张梅,孟祥冰,等.平行手术:基于ACP的智能手术计算方法[J].模式识别与人工智能,2017,30(11):961-970. WANG Feiyue,ZHANG Mei,MENG Xiangbing,et al.Parallel surgery:An ACP-based approach intelligent operations[J].Pattern Recognition and Artificial Intelligence,2017,30(11):961-970. |
[46] | 王飞跃,李长贵,国元元,等.平行高特:基于ACP的平行痛风诊疗系统框架[J].模式识别与人工智能,2017,30(12):1057-1068. WANG Feiyue,LI Changgui,GUO Yuanyuan,et al.Parallel gott:An ACP-based system framework for gout diagnosis and treatment[J].Pattern Recognition and Artificial Intelligence,2017,30(12):1057-1068. |
[47] | 白天翔,王帅,沈震,等.平行机器人与平行无人系统:框架、结构、过程、平台及其应用[J].自动化学报,2017,43(2):161-175. BAI Tianxiang,WANG Shuai,SHEN Zhen,et al.Parallel robots and parallel unmanned systems:Frameworks,structures,processes,platforms and applications[J].Acta Automatica Sinica,2017,43(2):161-175. |
[48] | 袁勇,王飞跃.平行区块链:概念、方法与内涵解析[J].自动化学报,2017,43(10):1703-1712. YUAN Yong,WANG Feiyue.Parallel blockchain:Concept,methods,and issues[J].Acta Automatica Sinica,2017,43(10):1703-1712. |
[49] | 田劼,王苏彧,穆晶,等.悬臂式掘进机空间位姿的运动学模型与仿真[J].煤炭学报,2015,40(11):2617-2622. TIAN Jie,WANG Suyu,MU Jing,et al.Spatial pose kinematics model and simulation of boom-type roadheader [J].Journal of China Coal Society,2015,40(11):2617-2622. |
[50] | 郝雪弟,景新平,张中平,等.机器人化钻锚车钻臂工作空间分析及轨迹规划[J].中南大学学报(自然科学版),2019,50(9):2128-2137. HAO Xuedi,JING Xinping,ZHANG Zhongping,et al.Workspace analysis and trajectory planning of drill arm of roboticized bolting truck[J].Journal of Central South University(Science and Technology),2019,50(9):2128-2137. |
[51] | GUO Yinan,ZHANG Xu,GONG Dunwei,et al.Novel interactive preference-based multiobjective evolutionary optimization for bolt supporting networks[J].IEEE Transactions on Evolutionary Computation,2020,24(4):750-764. |
https://blog.sciencenet.cn/blog-2374-1311803.html
上一篇:[转载]中国科协 ‖ 自动化领域高质量科技期刊分级目录
下一篇:[转载]《自动化学报》发表文章入选第六届中国科协优秀科技论文